Project type
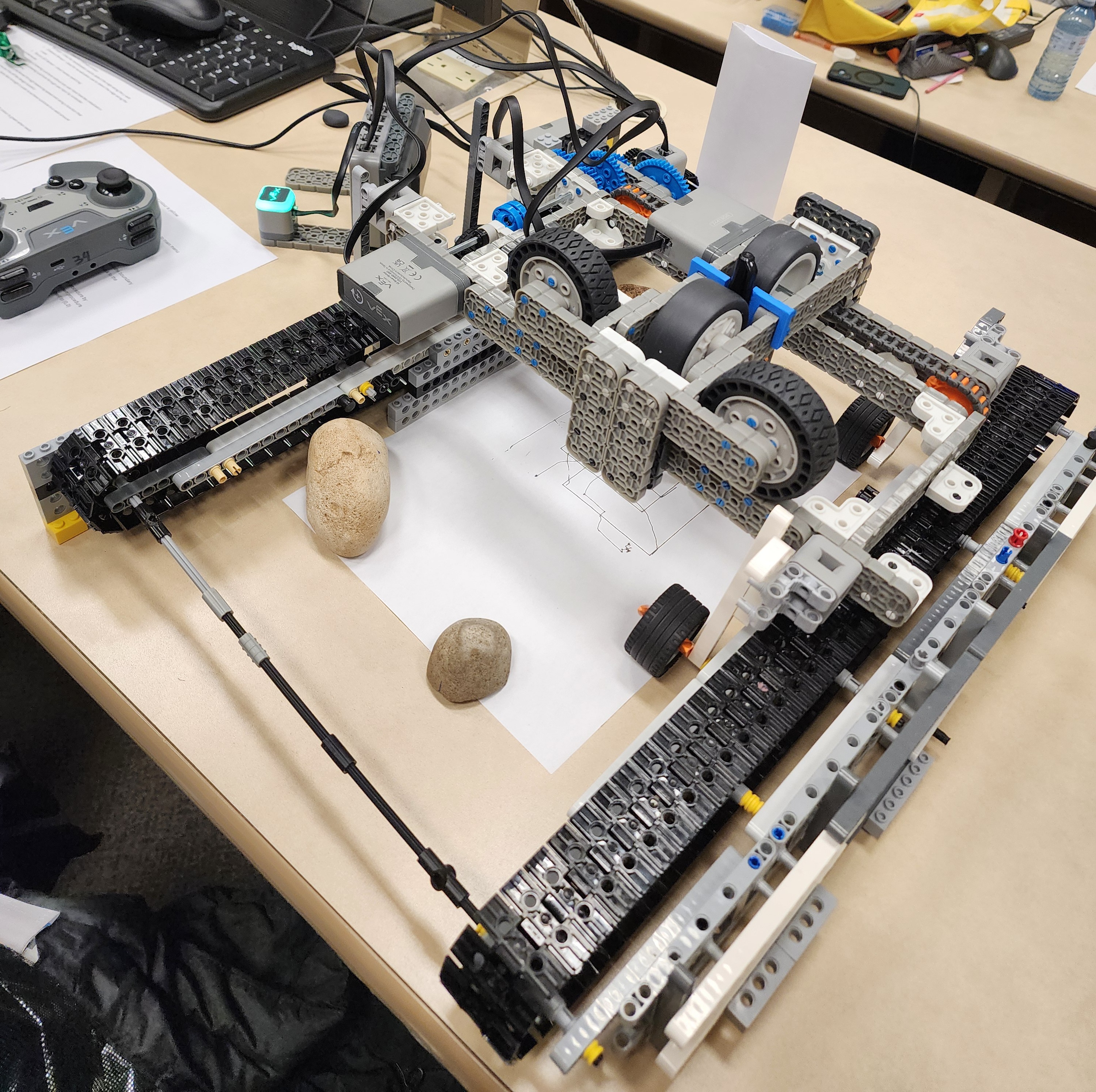
Robotics and controls
Timeline
Oct 2025 - Dec 2025
Core stack
C++, Python, SolidWorks, 3D printing
Outcome
25 percent improvement in drawing stability